Who We Are
Auto Electronics Knowledge: Automotive Domain Controller
Intelligent upgrade needs to rely on a new electronic and electrical architecture
BG of traditional EE architecture upgrade
In the traditional distributed automotive electronic and electrical architecture, the information transmission and control of sensors and various electronic and electrical systems in the vehicle are completed by distributed automotive electronic controllers (ECUs). With the improvement of automotive electronics and functions The diversification of vehicles, the limitations of distributed architecture and ECU have posed challenges to the production cost, function realization and future development of vehicles. More integrated and intelligent solutions - domain controllers and intra-domain centralized architectures have emerged. born. The following points are the main reasons why domain controllers gradually replace ECUs:
(1) With the development of automobile electronics and intelligence, the number of ECUs and wiring harnesses has become a cost and vehicle weight burden.
In a distributed(EE)architecture, ECUs are used in braking systems, transmission systems, suspension systems, safety systems, drive systems, etc. Almost every independent function and sensor of the vehicle needs to be equipped with an ECU. With the improvement of the electronic level and intelligence of current automobiles, the number of ECUs in bicycles continues to increase. In 2019, the number of ECUs in Chinese automobile bicycles was 25. Currently, the number of main ECUs in high-end models and highly intelligent models has reached more than 100, and the total number of ECUs with some simple functions can exceed 200. The application of autonomous driving and other intelligent modules requires vehicles to require more sensors (such as cameras and radars) and processors. If a distributed architecture is still used to implement them, the number of automotive ECUs will significantly increase, driving up costs.

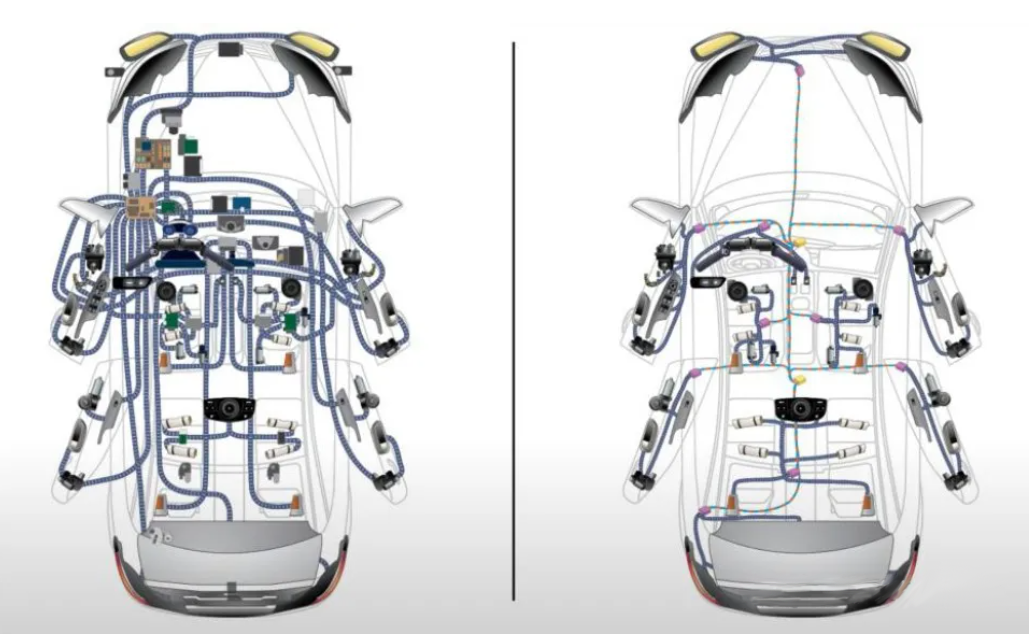
In addition, different ECUs on the same vehicle also need to be connected through CAN and LIN buses. Therefore, the increase in the number of ECUs has also led to a significant increase in the number and complexity of bus harnesses. The increase in the bus wire harness will first increase the vehicle weight. At the same time, since the main material of the wire harness is copper, the increase in the bus wire harness will significantly increase the cost of the vehicle. The domain control architecture integrates the functions of multiple ECUs in the module into one domain controller, which can greatly control the number of ECUs and simplify the wiring harness.

(2) The distributed (EE)architecture has limited information transmission capabilities and cannot meet complex intelligent functions such as autonomous driving.
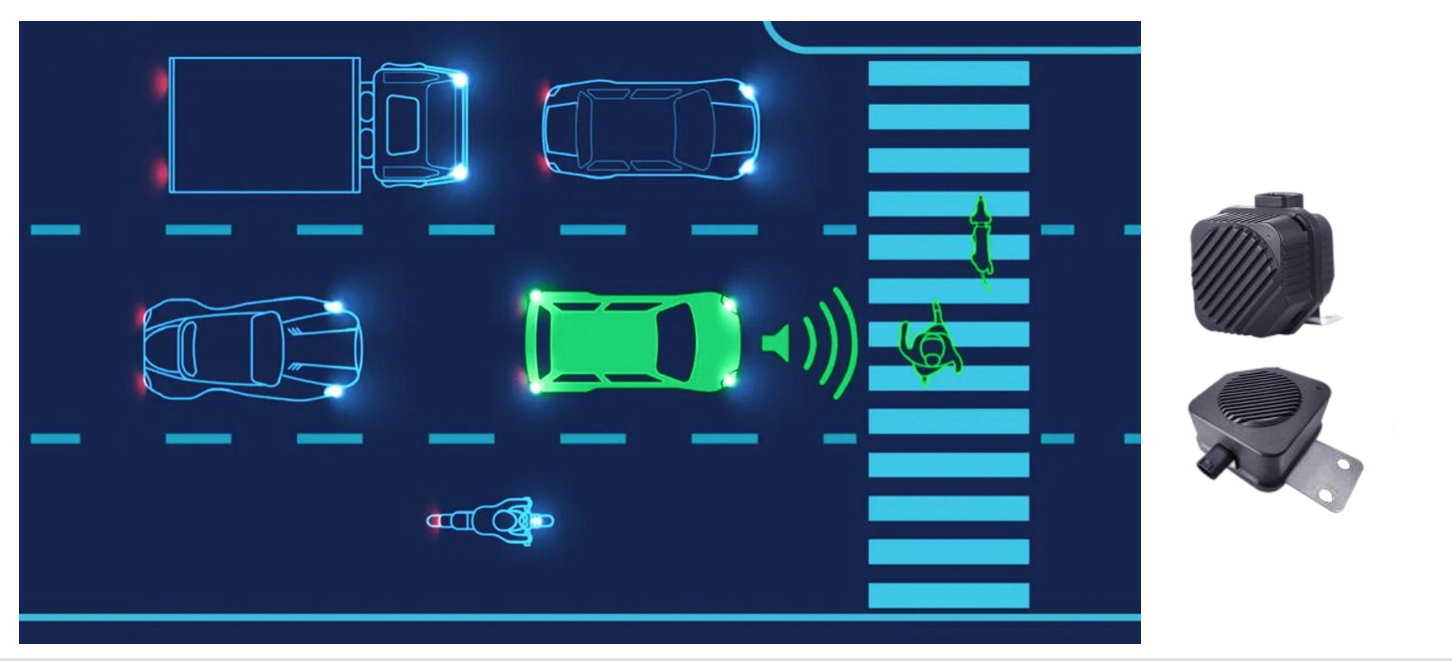
The communication capabilities between ECUs in the traditional distributed architecture are limited, mostly through CAN communication, LIN communication, Flex Ray, etc. The data transmission speed is very limited, up to about 20 Mbps per second. In autonomous driving, information needs to be transmitted and processed in real time. The amount of data generated by a camera will reach 200 MBps per second. The Lidar lidar used in autonomous driving at L3 and above will generate more than 1G Bps per second. The amount of data makes it impossible to achieve real-time transmission of information through a distributed architecture.
The application of domain controllers allows data information to be transmitted within functional modules through the central gateway using the Ethernet protocol, reaching information transmission speeds of Gigabit or even 10 Gigabit, which is crucial for the realization of complex intelligent functions such as autonomous driving. Therefore, the upgrade of the in-vehicle communication architecture must also be implemented based on the domain control architecture, and in-vehicle Ethernet will become the automotive backbone network in the future.
(3) Distributed architecture cannot meet the high computing power requirements of autonomous driving
Automobile intelligence requires the controller in the vehicle to have sufficient computing power to implement a large amount of information processing and calculations. Taking the autonomous driving function as an example, autonomous driving at the L2+ level and above requires at least 50 TOPS of computing power, and autonomous driving at the L3 level and above It requires more than 300 TOPS of computing power, and the L4 level requires 700~1000 TOPS of computing power. Such high computing power requirements are completely unreachable by distributed ECUs, and the autonomous driving domain controller is equipped with a high computing power chip. It can meet the information processing and computing requirements of various automobile intelligence. At the same time, suppliers will leave redundancy in computing power in the design of each ECU of the entire vehicle, and there are overlapping functions between each ECU, which wastes a lot of computing power from the perspective of the entire vehicle. The redundant retention of domain controllers is for the entire domain, minimizing redundant overlap and idle computing power.
(4) The domain controller realizes the decoupling of software and hardware and realizes OTA of software
In the traditional(EE) distributed ECU architecture, point-to-point data transmission is carried out between each ECU through CAN and LIN buses, and the communication method has been determined when the car leaves the factory. In intelligent connected cars, a large number of functions require coordination between ECUs. The current signal-based point-to-point communication between ECUs will become extremely complex and lack flexibility and scalability. Small functional changes will cause the entire Changes to the vehicle communication matrix. Therefore, United Electronics introduced SOA into the current automotive software design. Vehicle functions are structured into different service components based on the service-oriented design concept. Different from the traditional signal-oriented architecture, each service in SOA has a unique and independent identity, and complete its own development through service middleware.

Tags :